Presented by 触れる図鑑
モーターの力でロボットが動く二足歩行ロボットを作ろう
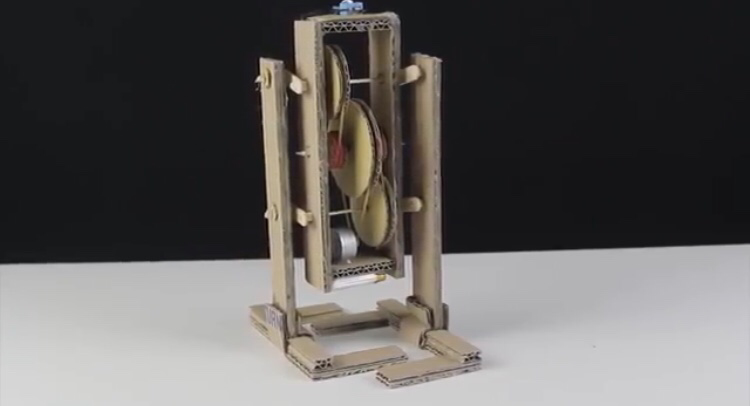
トコトコと歩くことが出来るロボットを、自分で作ってみたいと思いませんか?
プログラミングは一切不要。モーターの力で動き出す「ダンボールロボット」の作り方を一緒に作っていきましょう!
ダンボールロボットに必要な材料と道具
[材料]
- ダンボール✕複数枚
- 小型モーター✕1(ゆっくり動くもの)
- 小型スイッチ✕1
- 連結棒✕4
- 銅線(30ccm)程度✕1
- 電池✕1
- 輪ゴム✕3
- ストロー✕1
- 竹串✕4
[道具]
- カッター
- コンパス
- ニッパー
- グルーガン
- ハンダゴテ(なくても作れます)
- 接着剤
- ドリル(なければキリで可)
ご自宅にはなかなかないものばかりなので、足りないパーツはホームセンター等に行って、買い揃えてください。
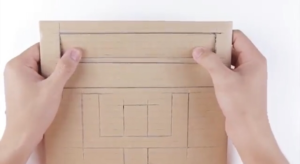
1.18cm✕3cm程度の細長い長方形を2つ切り出し穴を3つあける

ダンボールから18cm✕3cm程度の細長い長方形を2つ切り出してください。
2つのパーツに連結器に空いている穴と同じ間隔で、ストローが通るぐらいの穴を3つあけましょう。
2.1の穴にストローを通し、接着剤で固定する

1であけたそれぞれの穴に、ちょうど穴の幅と同じぐらいの大きさに切ったストローを入れ接着剤で固定します。
3.片方のパーツに3cm✕5cmのパーツ✕2とモーターをくっつける

3cm✕5cmのパーツを2つダンボールから切り出し、2で作った片方のパーツの上下にグルーガンで固定します。
その後、固定したダンボールに乗せるようにモーターをグルーガンで固定します。
この時にモーターから出ている銅線(短い場合orない場合は銅線を継ぎ足してください)は、巻き込まれないように2のダンボールの内側を通して上側に出してください。
4.2種のパーツを切り出し、ギアを3つ作る

- (A)半径2.5cm程度の円形のパーツ✕6
- (B)半径2.4cm程度の円形のパーツ✕3
上記のパーツを切り出し、BをA2つでサンドし(接着剤で固定)て中心に竹串が通るぐらいの穴をあけてギアを作ります。
同じものを全部で3つ作りましょう。
5.4とは異なる2種のパーツを切り出し、小さなギアを2つ作る

- (C)半径1cm程度の円形のパーツ✕4
- (D)半径0.9cm程度の円形のパーツ✕2
切り出したCとDを4の要領で組み合わせ、小さなギアを2つ作ります。
6.それぞれを竹串に通し、3で作った本体の穴に通す

- 1個目の穴:左側に大きなギアを1つ
- 2個目の穴:左上の大きなギアの真下に小さなギアを1つ、ちょうど真ん中に大きなギアを1つ、右下の大きなギア真上に小さなギアを1つ
- 3個目の穴:右側に多いなギアを1つ
3で作った本体の穴に、上記の順になるように4、5で作ったギアを竹串に通してください。
1個目の穴と3個目の穴に、先に竹串とギアを通すと作業が楽ですよ!
7.ギアとギア、それとモーターに輪ゴムを通し、残りの1のパーツで蓋をする

- [輪ゴム1]左側の大きなギアと真下にある小さなギア
- [輪ゴム2]真ん中の大きなギアとモーターの出っ張り
- [輪ゴム3]右側の大きなギアと真上にある小さなギア
上記のように3つの輪ゴムを通し、残りの1で作ったパーツで蓋をしてください。
8.連結器と竹串をグルーガンでくっつけ、不要な竹串をカットする
左右それぞれから伸びる竹串に連結器を画像のようにはめ込みましょう。
また連結器側の残った穴に短い竹串を通し、こちらもグルーガンで固定します。
残りの連結器から出すぎている竹串と真ん中の竹串をニッパーでカットします。
9.3種のパーツを切り出して組み合わせ、ロボットの足底を作る
- (E)横の長さ10cm程度の大きな「山」の字状のパーツ✕2
- (F)15cm✕3cm程度の細い長方形✕2
- (G)10cm✕2cm程度の細長い長方形✕4
E~Gのパーツを切り出します。
Eを足底とし横の長い部分にGを重ね、同じものを2つ作ります。
10.加工したFと9のパーツを組み合わせ脚部(きゃくぶ)を作り、本体と合体!

Fに連結器から伸びる上下2本の竹串がちょうど入るぐらいの間隔の穴をあけます。
その穴に2の要領でストローを通し、接着剤で固定。
さらに9で作った足底と組み合わせロボットの脚部を2つ作ります。
最後にそれぞれの脚部の穴と本体の連結器から伸びる竹串を通し、出すぎている竹串をカットして、グルーガンで脚部を固定。
この時、手で脚を動かして上手くギアが連動して脚が動くか確認しておきましょう。
11.上部にスイッチをくっつけ、お尻部分に電池をくっつけ銅線をつなげたら完成!
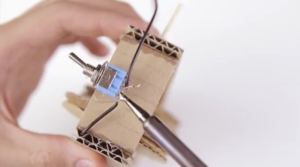
本体上部にスイッチをくっつけ、モーターから伸びる電線とつなげます。
次に本体の真下、ちょうどロボットのお尻の方に電池をくっつけ、スイッチから伸びる銅線をつなげます。
(この時、スイッチから伸びる銅線もダンボールの中を通しましょう)
最後にスイッチを入れて、ロボットの脚が上手く動き出したら完成です!
上手く歩けるかな? 出来たら感動の超大作!
必要なパーツ数こそ決して多くはないですが、ロボットが動く仕組みとモーターを動かす技術が必要となる大人でも難しい工作です。
でも苦労してロボットが上手く動いた時の感動はひとしお。
ちなみにロボットの頭は自由に作ってOKなので、好きなロボットやキャラクターの頭を載せましょう。
さぁ、君も動画と記事を参考にオリジナルのロボットを作ってみませんか?